$10.32
$12.90
50% OFF! Hot items selling fast—Grab them before they're gone!

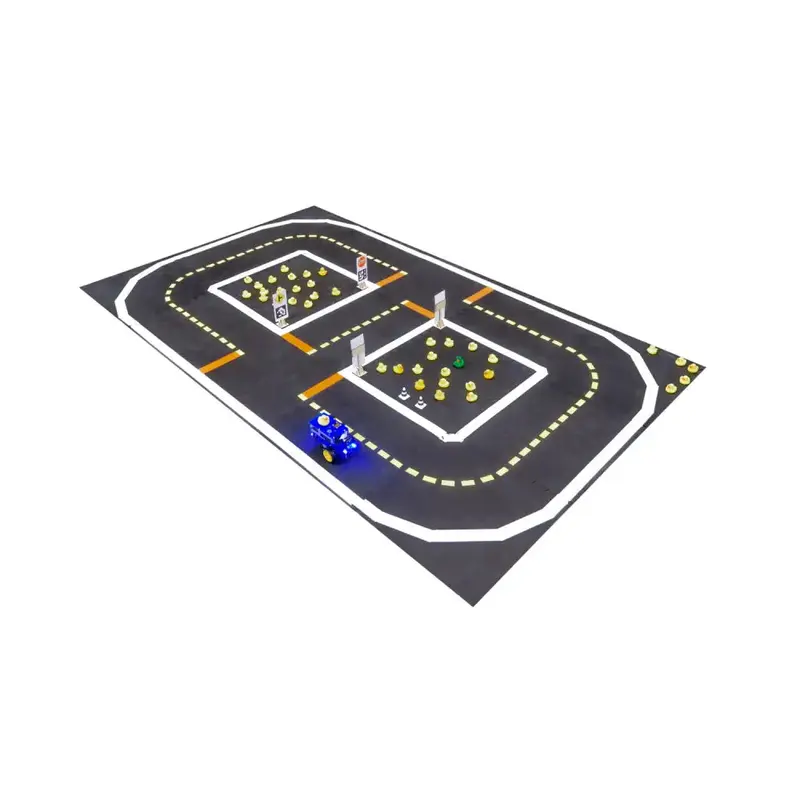
Ball Balancing Table is a hands-on experiment system, closing the gap between real industrial systems and DIY-approach. The ready-to-use Python code involves PID control as well as manual servo motor control. Open-source software makes it possible for hobyists, students and researchers to modify and test their own developed algorithms.
Product comes with a Raspberry Pi singleboard computer and Python code can be written directly on RasPi.
View moreWhat’s Included
Product comes with the Raspberry Pi controller, example codes in Python software and all the necessary cables and accesories.
This is non-academic version. Courseware is not included.
Dimensions
Platform Dimensions (Length * Width): 375mm. * 310mm. ( 2mm.)
Base Dimensions (Length * Width): 410mm. x 350mm. ( 2mm.)
LinksAttached files
Multimedia
docReady(function() {$(‘button[aria-controls=unique-tab-5]’).one(‘click’,function() {$(“#iframe-video-1”).html(‘‘);})});Specifications
Payload: 260 gr.
Workspace: 7 in Pitch & Roll
Position Repeatability: 1mm.
Angular Sensitivity: 0.36
Max. Speed: 90 /second
Height (min-max): 130mm. – 150mm. ( 2mm.)
Platform Dimensions (Length * Width): 375mm. * 310mm. ( 2mm.)
Base Dimensions (Length * Width): 410mm. x 350mm. ( 2mm.)
Weight: 4,400 gr.
Ball Diameter: 40mm. ( 1mm.)
Motor Type: RC Servomotors with Built-In Encoder
Feedback Sensors: Resistive Touch Sensor (1200px * 800px)
Power Requirement: 12 V – 5 A (Adapter supplied with the product)